2020년 전기기사 3회차 64번 - 기출문제 및 해설
문제 1
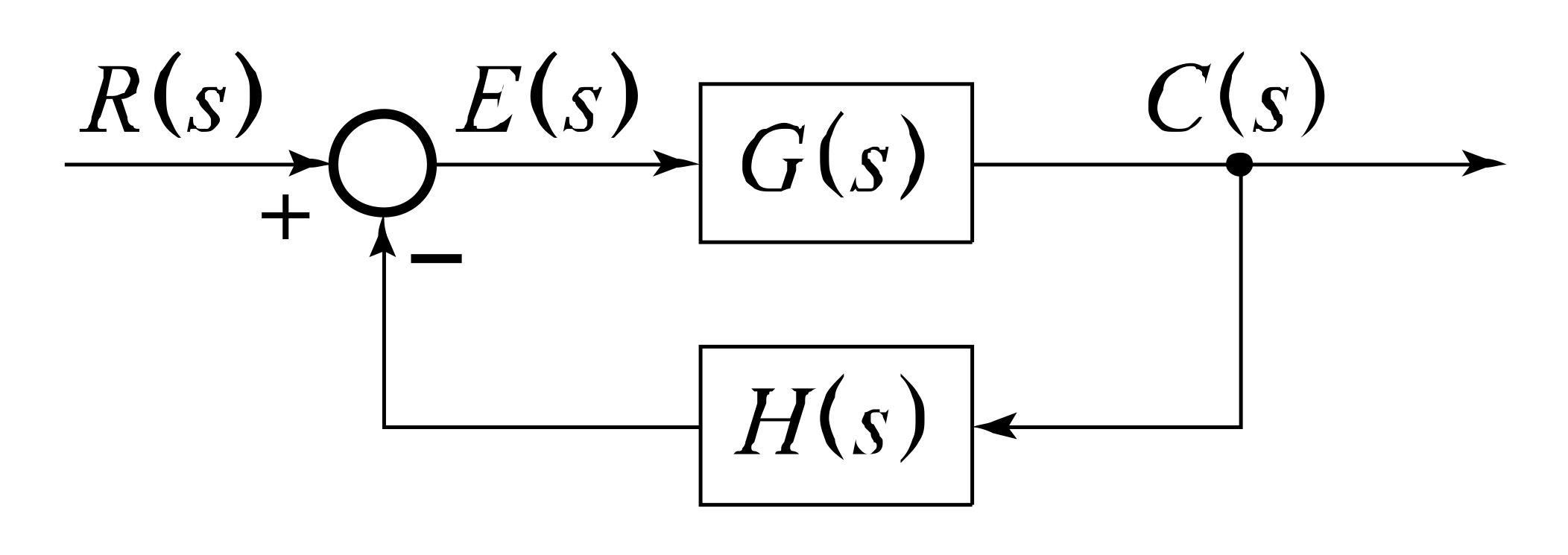
그림과 같이 피드백제어 시스템에서 입력이 단위계단함수일 때 정상상태 오차상수인 위치상수(
K
p
K_p
K
p
)는?
1.
K
p
=
lim
s
→
0
G
(
s
)
H
(
s
)
K_p=\lim_{s\rightarrow 0}G(s)H(s)
K
p
=
lim
s
→
0
G
(
s
)
H
(
s
)
2.
K
p
=
lim
s
→
0
G
(
s
)
H
(
s
)
K_p=\lim_{s\rightarrow 0}
\frac{G(s)}
{H(s)}
K
p
=
lim
s
→
0
H
(
s
)
G
(
s
)
3.
K
p
=
lim
s
→
∞
G
(
s
)
H
(
s
)
K_p=\lim_{s\rightarrow \infty }G(s)H(s)
K
p
=
lim
s
→
∞
G
(
s
)
H
(
s
)
4.
K
p
=
lim
s
→
∞
G
(
s
)
H
(
s
)
K_p=\lim_{s\rightarrow \infty }
\frac{G(s)}
{H(s)}
K
p
=
lim
s
→
∞
H
(
s
)
G
(
s
)
💡 로그인하면 학습 진행률이 자동으로 저장되고, 북마크와 오답노트를 사용할 수 있습니다.
댓글
0/500
등록
이전
다음