2021년 전기기사 1회차 66번 - 기출문제 및 해설
문제 1
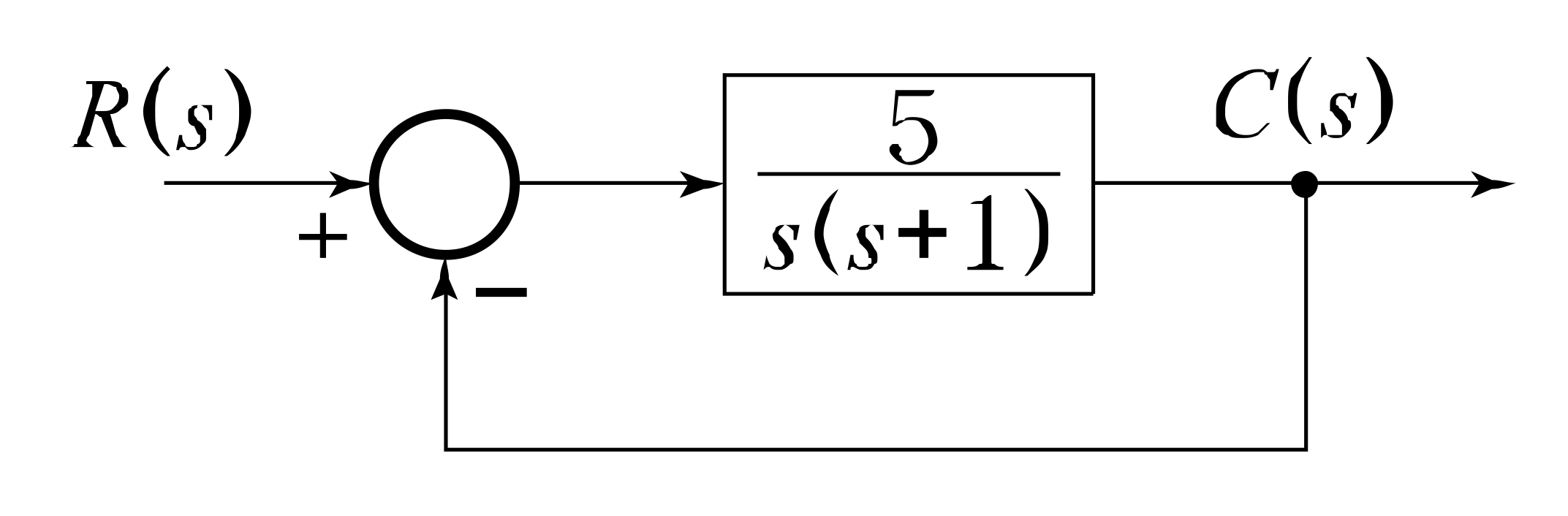
블록선도와 같은 단위 피드백 제어시스템의 상태방정식은?
(단, 상태변수는
x
1
(
t
)
=
c
(
t
)
,
x
2
(
t
)
=
d
d
t
c
(
t
)
x_1(t) = c(t),\ x_2(t) =
\frac{d}
{dt}c(t)
x
1
(
t
)
=
c
(
t
)
,
x
2
(
t
)
=
d
t
d
c
(
t
)
로 한다.)
1.
x
1
˙
(
t
)
=
x
2
(
t
)
x
1
˙
\dot{x_1}
x
1
˙
(t) = x_2(t)
x
1
˙
(
t
)
=
x
2
(
t
)
x
2
˙
(
t
)
=
−
5
x
1
(
t
)
−
x
2
(
t
)
+
5
r
(
t
)
x
2
˙
\dot{x_2}
x
2
˙
(t) = -5x_1(t)-x_2(t)+5r(t)
x
2
˙
(
t
)
=
−
5
x
1
(
t
)
−
x
2
(
t
)
+
5
r
(
t
)
2.
x
1
˙
(
t
)
=
x
2
(
t
)
x
1
˙
\dot{x_1}
x
1
˙
(t) = x_2(t)
x
1
˙
(
t
)
=
x
2
(
t
)
x
2
˙
(
t
)
=
−
5
x
1
(
t
)
−
x
2
(
t
)
−
5
r
(
t
)
x
2
˙
\dot{x_2}
x
2
˙
(t) = -5x_1(t)-x_2(t)-5r(t)
x
2
˙
(
t
)
=
−
5
x
1
(
t
)
−
x
2
(
t
)
−
5
r
(
t
)
3.
x
1
˙
(
t
)
=
−
x
2
(
t
)
x
1
˙
\dot{x_1}
x
1
˙
(t) =-x_2(t)
x
1
˙
(
t
)
=
−
x
2
(
t
)
x
2
˙
(
t
)
=
5
x
1
(
t
)
+
x
2
(
t
)
−
5
r
(
t
)
x
2
˙
\dot{x_2}
x
2
˙
(t) = 5x_1(t)+x_2(t)-5r(t)
x
2
˙
(
t
)
=
5
x
1
(
t
)
+
x
2
(
t
)
−
5
r
(
t
)
4.
x
1
˙
(
t
)
=
−
x
2
(
t
)
x
1
˙
\dot{x_1}
x
1
˙
(t) =-x_2(t)
x
1
˙
(
t
)
=
−
x
2
(
t
)
x
2
˙
(
t
)
=
−
5
x
1
(
t
)
−
x
2
(
t
)
+
5
r
(
t
)
x
2
˙
\dot{x_2}
x
2
˙
(t) = -5x_1(t)-x_2(t)+5r(t)
x
2
˙
(
t
)
=
−
5
x
1
(
t
)
−
x
2
(
t
)
+
5
r
(
t
)
💡 로그인하면 학습 진행률이 자동으로 저장되고, 북마크와 오답노트를 사용할 수 있습니다.
댓글
0/500
등록
이전
다음